كشف فريق بحثي صيني من جامعة ووهان عن إطار جديد قد يغير طريقة تفاعل الروبوتات مع الأجسام، وذلك عبر نموذج قادر على منح الروبوتات مهارات تعامل تشبه البشر دون الحاجة إلى تدريب مسبق لكل مهمة. وجاء الإعلان عبر ورقة علمية جديدة نُشرت على منصة arXiv، توضح كيف يمكن لهذا النظام أن يوسع نطاق المهام التي يمكن للروبوتات humanoid تنفيذها بدقة وكفاءة.
في الوقت الحالي، تستطيع الروبوتات تنفيذ مهام مثل استخدام الأدوات أو المشي أو الإمساك بالأشياء، لكنها تواجه صعوبات كبيرة عندما يتغير شكل الجسم أو الإضاءة أو بيئة العمل. أما التحدي الأكبر فهو عدم قدرة الروبوت على تعميم مهاراته على مهام جديدة لم يتدرب عليها مسبقاً.
نظام RGMP… إطار يمنح الروبوتات فهماً هندسياً للمحيط
من أجل حل هذا القيد، طوّر الباحثون إطاراً جديداً باسم RGMP اختصاراً لـ recurrent geometric-prior multimodal policy. ويهدف هذا النظام إلى تزويد الروبوتات بما يشبه “الفطرة الهندسية”، أي القدرة على فهم الأشكال والمسافات والفراغات عند التعامل مع الأشياء.
يتكون النظام من جزأين رئيسيين:
1. وحدة اختيار المهارة: Geometric-Prior Skill Selector
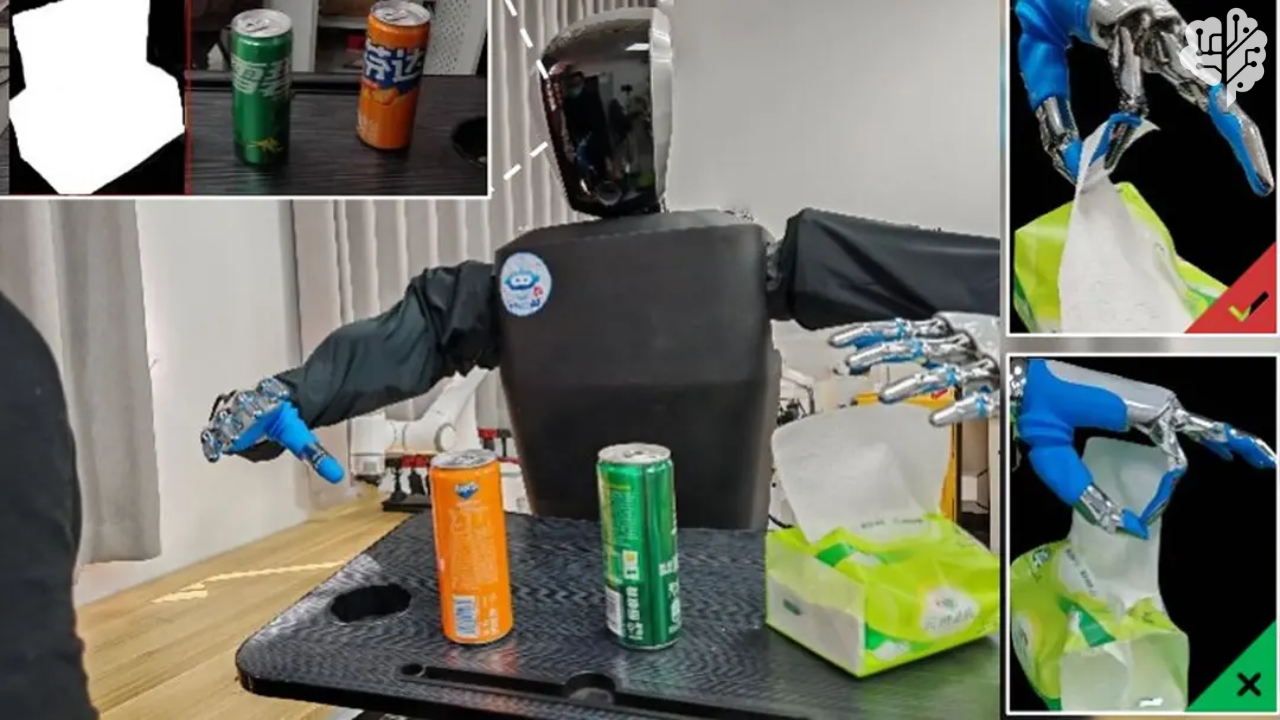
هذه الوحدة تساعد الروبوت على تحديد المهارة المناسبة لتنفيذ المهمة. وبالاعتماد على الكاميرات وأجهزة الاستشعار، يمكن للروبوت تحليل شكل الجسم وحجمه واتجاهه، ثم يقرر إن كان عليه الإمساك به بيد واحدة، أو بيدين، أو دفعه، أو رفعه… إلخ.
2. الشبكة المتكيفة لحساب الحركة: Adaptive Recursive Gaussian Network
بعد تحديد المهارة، تتولى هذه الوحدة حساب حركة الروبوت خطوة بخطوة. وتكمن قوتها في قدرتها على تعلّم أنماط الحركة بكفاءة عالية جداً، بحيث تحتاج إلى قدر قليل من بيانات التدريب مقارنة بالأنظمة الحالية.
نتائج مذهلة… نجاح بنسبة 87% في مهام جديدة بالكامل
عند اختبار النظام، تمكّن الروبوت من تنفيذ مهام لم يتلقَّ أي تدريب عليها، وحقق نسبة نجاح بلغت 87%، وهي نسبة تتفوق بشكل واضح على النماذج المستخدمة حالياً.
كما أظهرت التجارب أن RGMP أكثر كفاءة بنحو خمسة أضعاف مقارنة بنماذج السياسات المعتمدة على تقنيات الانتشار (diffusion-policy)، والتي تُعتبر حالياً من أقوى التقنيات في الروبوتات.
خطوة كبيرة نحو روبوتات منزلية وصناعية أكثر ذكاءً
تتيح هذه القدرات تطبيقات واسعة، مثل استخدام الروبوتات في المنازل للتنظيف أو الترتيب أو حتى الطهي، دون الحاجة إلى تدريبات ضخمة. كما يمكن اعتمادها في المستودعات والمطاعم وسلاسل الإنتاج حيث تتغير المهام والأجسام باستمرار.
خطوات البحث المقبلة
يعمل الفريق حالياً على تطوير النظام ليصبح قادراً على تعلم المهارات الجديدة دون تدخل بشري تقريباً. كما يسعى إلى جعل الروبوت قادراً على استنتاج الحركة المناسبة لأجسام جديدة من تلقاء نفسه.
وقال الباحث الرئيسي شويتاو لي:
“سيتركز بحثنا المستقبلي على تعزيز قدرة RGMP على التعميم عبر مجموعة أوسع من المهام، إضافة إلى تطوير قدرته على توليد حركات مخصصة تلقائياً اعتماداً على معرفة محدودة أو بدون تدخل بشري”.
المصدر: Interesting Engineering



